Per comprendere appieno i fenomeni fisici che governano il movimento di un'automobile su una pista circolare, è essenziale partire dalle basi della cinematica, ovvero dalla descrizione del moto. Quando analizziamo il movimento degli oggetti, oltre allo spazio percorso, è fondamentale considerare anche il tempo impiegato per percorrerlo. La velocità media, definita come il rapporto tra lo spostamento del corpo e l'intervallo di tempo in cui esso è avvenuto, ci fornisce una prima misurazione oggettiva. Essa è direttamente proporzionale alla distanza percorsa e inversamente proporzionale all'intervallo di tempo impiegato, configurandosi inizialmente come una grandezza scalare.
Per descrivere formalmente il moto di un veicolo lungo una strada, è necessario individuare aspetti misurabili e non soggettivi, valutabili allo stesso modo da osservatori diversi. Inoltre, è cruciale identificare i parametri che influenzano il fenomeno in studio, tralasciando in una prima fase le caratteristiche meno rilevanti. Ad esempio, nello studio del moto di un'automobile lungo un tratto di circuito, la lunghezza del tratto e il tempo impiegato sono essenziali, mentre il colore del veicolo o la luminosità dei fari possono essere trascurati.
Per una descrizione più precisa, si potrebbe analizzare il moto di ogni singola componente del veicolo. Tuttavia, ciò complicherebbe notevolmente il problema, richiedendo l'uso di sistemi di particelle e della teoria dei corpi rigidi. Per semplificare, si considera il veicolo come un punto materiale, un corpo puntiforme. Questa astrazione permette di non considerare il movimento di ogni sua singola parte, pur comprendendo ciò che accade quando un'automobile viaggia.
Durante uno spostamento, il punto materiale (che rappresenta il veicolo) occupa punti diversi nello spazio. Inizialmente, si può considerare un moto unidimensionale, descritto da un'unica coordinata spaziale, come nel caso di un camion su una strada rettilinea. Sovrapponendo la strada a una retta, fissando un punto origine (O) e un verso positivo, si può descrivere la posizione. Tuttavia, il moto rettilineo è un caso particolare; moti più comuni coinvolgono oggetti che si muovono liberamente in tutte le direzioni.
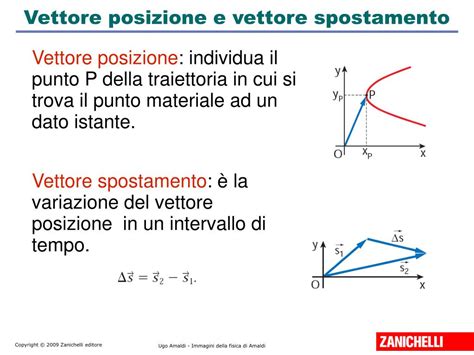
Per descrivere la generica posizione di un punto materiale nello spazio, sono necessarie tre coordinate: P(x,y,z). Questa posizione può essere indicata da un vettore, detto vettore posizione, che congiunge l'origine del sistema di riferimento con il punto nello spazio. In cinematica, lo spostamento è definito come il cambiamento di posizione di un punto materiale in movimento. Dati due vettori posizione in istanti di tempo diversi, il vettore spostamento è la differenza tra questi due vettori.
Un'altra unità di misura comune per la velocità è il chilometro all'ora (km/h), utilizzata dai tachimetri delle automobili. Ad esempio, durante una gara ciclistica, un vincitore potrebbe percorrere gli ultimi 500 metri in 30 secondi. Tuttavia, la velocità di un veicolo in un istante preciso può variare rispetto alla velocità media, specialmente in presenza di ostacoli o curve. La velocità istantanea si ottiene rendendo infinitesimale l'intervallo di tempo nella definizione di velocità media vettoriale. Strumenti come l'autovelox rilevano la velocità istantanea, mentre il tutor, tramite due rilevamenti successivi, calcola la velocità media.
La matematica fornisce uno strumento per determinare la posizione esatta di un oggetto in movimento: la legge oraria. Questa funzione associa ad ogni istante di tempo la posizione del punto materiale. La legge oraria permette di conoscere la traiettoria percorsa dall'oggetto e può essere rappresentata graficamente con il tempo sull'asse delle ascisse e la posizione sull'asse delle ordinate. Questo grafico fornisce informazioni sul tipo di moto.
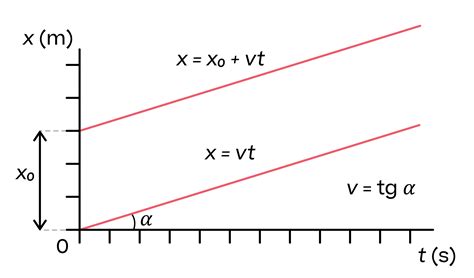
Il moto più semplice è quello rettilineo uniforme, dove un corpo percorre spazi uguali in tempi uguali a velocità costante. Se il moto avviene lungo l'asse x, con posizioni x1 e x2 in istanti t1 e t2, la velocità è data dal modulo $vm$. La legge oraria del moto rettilineo uniforme è $s(t) = s0 + vt$. Un grafico spazio-tempo per questo moto mostra una variazione lineare della posizione nel tempo, indicando una velocità costante.
Nel moto circolare uniforme, il vettore velocità tangenziale, pur avendo modulo costante, cambia continuamente direzione. Questa variazione indica la presenza di un'accelerazione diretta verso il centro della circonferenza: l'accelerazione centripeta. Il vettore velocità tangenziale è sempre tangente alla circonferenza e perpendicolare al raggio vettore. Spostando graficamente i vettori velocità tangenziale in modo che le loro origini coincidano, si osserva che la punta del vettore velocità descrive un moto circolare uniforme.
Velocità Angolare e Tangenziale
Consideriamo gli orologi come esempio di moto circolare uniforme. La velocità angolare delle lancette (secondi, minuti, ore) può essere calcolata. Se le lancette hanno lunghezze diverse (ad esempio, 15 cm, 12.5 cm, 10 cm), è possibile calcolare la velocità tangenziale della punta di ciascuna lancetta. Si può anche determinare quanti chilometri percorre la punta della lancetta dei secondi nell'arco di un giorno.

Su una giostra che ruota con moto circolare uniforme di periodo T, tutti i punti si muovono con la stessa velocità angolare. Tuttavia, i punti più vicini al centro sono più lenti di quelli sul bordo. Questo è espresso dalla formula $v = \omega r$, dove il modulo $v$ della velocità aumenta proporzionalmente alla distanza $r$ dal centro. La velocità angolare ($\omega$) è misurata in radianti al secondo (rad/s) e, a differenza della velocità tangenziale, non dipende dal raggio. Corpi con la stessa velocità angolare possono avere velocità tangenziale diversa a seconda della loro distanza dal centro.
Accelerazione Centripeta e Dinamica delle Curve
Il vettore accelerazione centripeta è diretto verso il centro della circonferenza. Per capire a cosa è dovuta la deviazione da una traiettoria rettilinea a una curva, è necessario introdurre concetti di dinamica, in particolare le forze di attrito. Questo ci permette di rispondere a domande come: cosa permette a una macchina di mantenere una traiettoria curva? Cosa le garantisce di non sbandare e cosa succede invece quando sbanda?
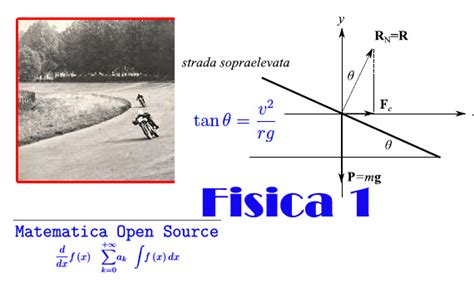
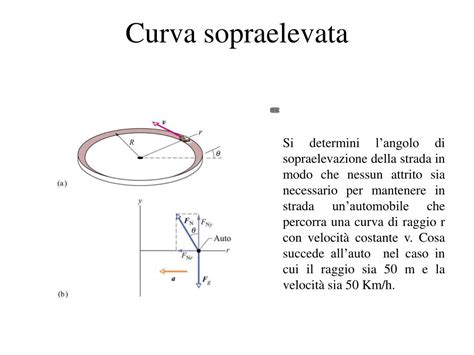
Quando un veicolo affronta una curva, una forza centripeta è necessaria per mantenerlo in carreggiata. Se la strada è orizzontale, questa forza è fornita dall'aderenza (attrito statico) tra pneumatici e asfalto. Spesso, le curve sono sopraelevate, in modo che il peso del veicolo contribuisca alla forza centripeta necessaria per la tenuta di strada, riducendo anche l'usura dei pneumatici. Se l'angolo di sopraelevazione raggiunge i 90°, si ottiene un dispositivo noto come rotore.
Un esempio pratico è un'automobile che affronta una curva alla velocità di 10 m/s con un raggio di curvatura di 24 m. La curva può essere progettata in modo tale che l'auto percorra la traiettoria senza fare affidamento sull'attrito.
Consideriamo un esempio: un'automobile affronta una curva con un raggio di curvatura di 100 m e un'inclinazione di 10°. È necessario calcolare quale deve essere il valore minimo del coefficiente di attrito statico tra piano stradale e pneumatici affinché l'auto non sbandi.
Un altro esempio riguarda una curva con un raggio di curvatura di 100 m e una sopraelevazione di 10°. Si verifica se l'auto può rimanere ferma sulla curva sopraelevata. Nelle strade ordinarie, la pendenza è di pochi punti percentuali, quindi il termine $\tan(\alpha)$ rispetto all'unità può essere trascurato. La normativa CNR del 1980 propone pendenze tra 0.025 e 0.07 e un raggio massimo di 5 volte il raggio minimo. Un abaco può riportare il raggio minimo in funzione della velocità e della pendenza.
Moto Uniformemente Accelerato
Per descrivere la variazione della velocità di un corpo in movimento, si introduce l'accelerazione media, definita come il rapporto tra la variazione di velocità e l'intervallo di tempo in cui essa avviene. Se la velocità varia di quantità uguali in tempi uguali, il moto è detto uniformemente accelerato. In questo caso, è possibile determinare lo spazio percorso conoscendo la velocità e l'accelerazione, senza conoscere il tempo. Si può ricavare il tempo dalla formula della velocità e utilizzare la media aritmetica delle velocità.
Il Moto Circolare e le sue Implicazioni
Il moto circolare è quello realizzato da un punto materiale che si muove lungo una circonferenza. Il vettore posizione è individuato dal raggio vettore. Il vettore spostamento è la differenza tra i vettori posizione successivi. Nei moti circolari, i vettori spostamento e velocità media cambiano continuamente direzione. Il vettore velocità istantanea ha modulo costante ma cambia direzione, rimanendo tangente alla traiettoria.
Il periodo (T) è l'intervallo di tempo per compiere un giro completo, mentre la frequenza (f) è il numero di giri nell'unità di tempo ($f=1/T$). La velocità tangenziale è la velocità di un corpo in moto circolare uniforme lungo una circonferenza di raggio r, che impiega un tempo T per percorrere l'intera circonferenza.
Un esempio di moto circolare uniforme su una pista è quello di un'automobile che percorre una pista circolare di raggio 250 m con una velocità costante di 108 km/h.a. Calcolare il tempo necessario per completare un giro della pista.b. Calcolare la velocità media durante questo giro.
Soluzione:Convertire la velocità da km/h a m/s: 108 km/h = 30 m/s.Calcolare la circonferenza della pista: $C = 2 \pi r = 2 \pi (250 \text{ m}) \approx 1570.8 \text{ m}$.Calcolare il tempo per un giro completo: $t = C / v = 1570.8 \text{ m} / 30 \text{ m/s} \approx 52.36 \text{ s}$.Risposta a: 52.36 s.
Poiché la velocità è costante e non ci sono variazioni, la velocità media è uguale alla velocità istantanea: $v_{\text{media}} = 30 \text{ m/s}$.Risposta b: 30 m/s.
Questo problema evidenzia la comprensione del moto circolare uniforme e dei concetti correlati. Per la parte a, è cruciale calcolare il tempo per completare un giro (periodo), convertendo le unità di misura e utilizzando la formula della circonferenza. Per la parte b, la velocità media su un giro completo è definita come lo spostamento totale diviso per l'intervallo di tempo totale. Poiché l'auto ritorna al punto di partenza, lo spostamento totale è zero, rendendo la velocità media zero indipendentemente dal tempo impiegato.
FISICA Teoria 9 - MOTO CIRCOLARE UNIFORME e ACCELERATO, FORZA CENTRIPETA
La progettazione di curve sopraelevate è fondamentale per la sicurezza stradale, permettendo alle automobili di mantenere traiettorie curve a velocità elevate senza sbandare, grazie alla combinazione di forza centripeta fornita dall'attrito e dalla componente del peso lungo il piano inclinato.
Forze di Attrito e Stabilità
Le forze di attrito giocano un ruolo cruciale nella fisica dell'automobile. L'attrito statico tra pneumatici e asfalto fornisce la forza centripeta necessaria per le curve su strade orizzontali. Quando una curva è sopraelevata, la forza centripeta è una combinazione della forza di attrito e di una componente della forza peso. Se la sopraelevazione è sufficiente, l'attrito può essere nullo, come nel caso di una curva perfettamente inclinata per una data velocità.
La progettazione delle strade tiene conto di normative specifiche per le pendenze e i raggi di curvatura, al fine di garantire la sicurezza in diverse condizioni di velocità e aderenza. Il coefficiente di attrito statico minimo richiesto per evitare lo sbandamento in curva è un parametro fondamentale nella progettazione stradale.
In sintesi, la fisica del moto di un'automobile su una pista circolare coinvolge concetti di cinematica come velocità e accelerazione, unitamente a principi di dinamica come le forze di attrito e la forza centripeta. La comprensione di queste interazioni è essenziale per la progettazione di veicoli sicuri e infrastrutture stradali efficienti.
tags: #automobile #pista #circolare #fisica