Il concetto di rango di una matrice è fondamentale nell'algebra lineare, rivestendo un ruolo cruciale in numerose applicazioni matematiche e ingegneristiche, dalla risoluzione di sistemi lineari alla determinazione dell'indipendenza lineare di vettori. Il rango di una matrice $A$ di dimensioni $m \times n$ può essere definito come l'ordine del più grande minore (sottomatrice quadrata) con determinante non nullo. Questo significa che, per determinare il rango, si devono analizzare i determinanti di varie sottomatrici, partendo dalle più grandi fino a trovare un determinante diverso da zero. Il metodo dell'orlatura, o dei minori orlati, è una strategia sistematica per affrontare questa ricerca, specialmente utile per matrici di dimensioni maggiori come le $4 \times 4$.
Il Determinante: Una Premessa Fondamentale
Prima di addentrarci nel calcolo del rango e nel metodo dell'orlatura, è essenziale comprendere a fondo il determinante di una matrice. Il determinante è un'applicazione che associa a una matrice quadrata $A$ un numero reale, indicato con $\text{det}A$. Questo valore numerico racchiude importanti informazioni sulle proprietà della matrice, come la sua invertibilità.
Il calcolo del determinante può essere effettuato in vari modi. Uno dei metodi più noti e ampiamente utilizzati è il metodo di Laplace, un approccio ricorsivo che si basa sulla scomposizione del determinante in termini di determinanti di sottomatrici di ordine inferiore.
Determinante di una Matrice di Ordine 2
Nel caso più semplice di una matrice quadrata di ordine 2, il calcolo del determinante è diretto. Prendiamo una generica matrice:
[A=\begin{bmatrix}a{11} & a{12} \a{21} & a{22}\end{bmatrix}]
Seguendo il metodo di Laplace rispetto alla prima riga, si ha che i complementi algebrici sono particolarmente semplici da determinare. Il determinante della matrice $A$ è quindi dato da:
KATEX
\begin{aligned}\text{det}(A) & = a{11}A{11} + a{12}A{12}= \& = a{11}a{22} + a{12}(-a{21}) \& = a{11}a{22} - a{12}a{21}\end{aligned}
KATEX
In sostanza, il determinante è la differenza tra il prodotto degli elementi sulla diagonale principale e il prodotto degli elementi sulla diagonale secondaria.
Determinante di una Matrice di Ordine 3
Per matrici di ordine superiore, come quelle $3 \times 3$, il metodo di Laplace diventa più articolato ma segue lo stesso principio ricorsivo. Consideriamo la matrice:
[A=\begin{bmatrix}2&0&-3\0&-1&1\-2&3&0\end{bmatrix}]
Il teorema di Laplace afferma che il determinante di $A$ è pari alla somma dei prodotti degli elementi di una qualsiasi riga o di una qualsiasi colonna per i rispettivi complementi algebrici. Applicando il metodo di Laplace sviluppando il determinante rispetto alla prima colonna, si ottiene:
KATEX
\begin{aligned}\text{det}(A) & =a{11}A{11}+a{21}A{21}+a{31}A{31} = \& = 2 \cdot \begin{bmatrix} -1&1\ 3&0 \end{bmatrix}##KATEX# +0 \cdot ##KATEX##\begin{bmatrix} 0 & -3 \ 3 & 0 \end{bmatrix}##KATEX# -2 \cdot ##KATEX##\begin{bmatrix} 0&-3\ -1&1 \end{bmatrix}##KATEX# = \& = 2 \cdot (-3) + 0 -2 \cdot (-3)=0.\end{aligned}
KATEX
Se applichiamo invece il metodo di Laplace sviluppando il determinante rispetto alla seconda riga, ci si aspetta di ottenere nuovamente 0. In effetti, si ha che:
KATEX
\begin{aligned}\text{det}(A) & =a{21}A{21}+a{22}A{22}+a{23}A{23}= \& = -1 \cdot \begin{bmatrix} 2&-3\ -2&0 \end{bmatrix}##KATEX# -1 \cdot ##KATEX##\begin{bmatrix} 2&0\ -2&3 \end{bmatrix}##KATEX##= \& = -1 \cdot (-6)-1 \cdot (6)=0\end{aligned}
KATEX
È importante notare che per le matrici di ordine 3 esiste anche un altro metodo per calcolare il determinante, chiamato comunemente regola di Sarrus, che offre un approccio alternativo e spesso più rapido per questo specifico ordine.
Determinante di una Matrice di Ordine 4
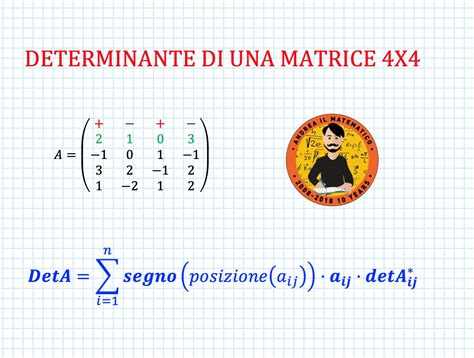
Per matrici di ordine 4, il calcolo del determinante con il metodo di Laplace diventa più laborioso, ma la strategia rimane la medesima. Consideriamo la seguente matrice $4 \times 4$:
[A=\begin{bmatrix}2& 1&0&-1\-1& 0&-2&1\3&0& 0 &0\1& -1& 2& -2\end{bmatrix}]
In questi casi, conviene seguire uno stratagemma per ridurre i calcoli: è opportuno sviluppare il determinante rispetto a una riga o una colonna che contenga il maggior numero di zeri. Nell'esempio dato, conviene sviluppare il determinante rispetto alla terza riga, dove sono presenti tre $0$. Questo riduce drasticamente il numero di sottomatrici di ordine 3 da calcolare.
Calcolo del determinante di una matrice con la regola di Laplace
Proprietà Importanti del Determinante
Oltre ai metodi di calcolo, è utile conoscere alcune importanti proprietà del determinante, che possono semplificare ulteriormente l'analisi delle matrici. Un teorema fondamentale è il Teorema di Binet:
Teorema (di Binet): siano $A, B \in M_n(\mathbb{R})$. Allora vale la relazione $\text{det}(A \cdot B)=\text{det}A\cdot \text{det}B$. Questo teorema è particolarmente utile quando si lavora con prodotti di matrici, poiché consente di calcolare il determinante del prodotto semplicemente moltiplicando i determinanti delle singole matrici.
Il Rango di una Matrice e i Minori
Sia ora $A \in M_{m \times n} (\mathbb{R})$. Il rango di una matrice $A$ del tipo $m \times n$ è definito come l'ordine del più grande minore diverso da zero. È cruciale non confondere il minore di una matrice con la sottomatrice. Una sottomatrice è semplicemente una matrice ottenuta eliminando alcune righe e/o colonne da una matrice data, mentre un minore è il determinante di una sottomatrice quadrata.
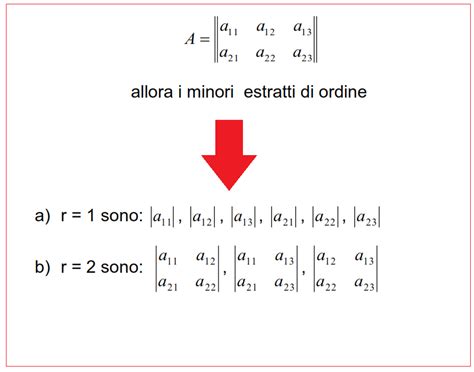
Esempio di Calcolo del Rango tramite Minori
Per comprendere meglio cosa siano i minori di una matrice e come si utilizzino per il calcolo del rango, consideriamo un esempio numerico. Prendiamo la matrice:
[B=\begin{bmatrix}-1&1&-1\0&2&-2\1&-3&3\end{bmatrix}]
Il procedimento per determinare il rango di una matrice con questo metodo è il seguente: per prima cosa si controlla se esiste almeno un minore di ordine $k=\text{min}{m,n}$ diverso da zero. Se esiste, la matrice $A$ ha rango $k$. Nel nostro caso, per la matrice $B$, $k = \text{min}{3,3}=3$. L'unico minore di questo tipo è proprio il determinante di $B$:
KATEX
\begin{aligned}\text{det} \begin{bmatrix} -1&1&-1\ 0&2&-2\ 1&-3&3 \end{bmatrix}##KATEX# & = -1 \cdot \text{det} ##KATEX##\begin{bmatrix} 2&-2\ -3&3 \end{bmatrix}##KATEX# +1 \cdot \text{det} ##KATEX##\begin{bmatrix} 1&-1\ 2&-2\ \end{bmatrix}##KATEX##= \& = -1 \cdot (6-6)+1 \cdot(-2+2)=0\end{aligned}
KATEX
Dato che il determinante di $B$ è nullo, si deduce che $B$ ha rango massimo 2, non 3. A questo punto, dobbiamo verificare se esiste un minore di ordine 2 non nullo. Si osserva che esiste un minore di ordine 2 non nullo: esso è il determinante della sottomatrice [\begin{bmatrix}-1&1\0&2\end{bmatrix}] ottenuta eliminando la terza riga e la terza colonna. Il suo determinante è $(-1)(2) - (1)(0) = -2$, che è diverso da zero. Pertanto, il rango della matrice $B$ è 2.
Il Metodo dell'Orlatura per il Calcolo del Rango
Il metodo dell'orlatura è un'estensione logica dell'approccio basato sui minori, particolarmente efficace quando si cerca il rango di matrici di dimensioni maggiori, come una $4 \times 4$. Questo metodo permette di procedere in modo incrementale, verificando l'esistenza di minori di ordine crescente.
Il procedimento inizia trovando un minore non nullo di ordine 1 (ovvero, un elemento della matrice diverso da zero). Una volta trovato un tale minore, si cerca un minore non nullo di ordine 2 che "orli" (contenga) il minore di ordine 1 trovato. Si prosegue in questo modo: se si trova un minore non nullo di ordine $k$, si cercano i minori di ordine $k+1$ che orlano tale minore di ordine $k$. Il rango della matrice sarà l'ordine massimo del minore non nullo che si riesce a trovare.
Per una matrice $4 \times 4$, il procedimento sarebbe:
- Trovare un minore non nullo di ordine 1: Questo è semplicemente un elemento $a_{ij} \neq 0$. Se tutti gli elementi sono zero, il rango è 0.
- Orlare a ordine 2: Data una sottomatrice $2 \times 2$ che contiene il minore di ordine 1 trovato e ha determinante non nullo, abbiamo trovato un minore di ordine 2.
- Orlare a ordine 3: Data una sottomatrice $3 \times 3$ che contiene il minore di ordine 2 trovato e ha determinante non nullo, abbiamo trovato un minore di ordine 3.
- Orlare a ordine 4: Data una sottomatrice $4 \times 4$ che contiene il minore di ordine 3 trovato e ha determinante non nullo (ovvero il determinante della matrice stessa), il rango è 4.
Se a un certo punto non si riesce a trovare un minore orlato non nullo di ordine superiore, il rango è l'ordine del minore non nullo più grande trovato fino a quel momento. Il vantaggio di questo metodo è che non è necessario calcolare tutti i minori di un certo ordine; una volta trovato un minore non nullo di ordine $k$, si orla solo quello, senza dover ricominciare da capo o testare altre sottomatrici di ordine $k$.
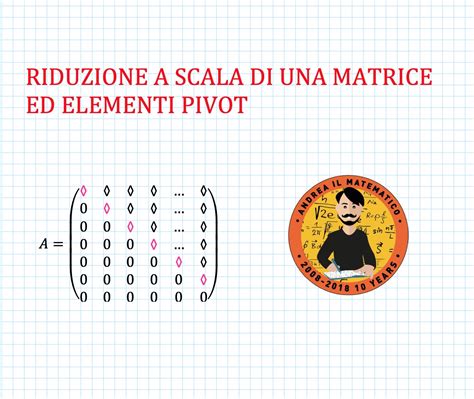
Altri Metodi per il Calcolo del Rango: L'Algoritmo di Gauss
Esistono anche altri metodi per calcolare il rango di una matrice $A \in M_{m \times n} (\mathbb{R})$. Un altro molto noto e utilizzato (anche per altri scopi, come la risoluzione di sistemi lineari) è l'algoritmo di Gauss, o eliminazione di Gauss. Questo algoritmo trasforma la matrice in una forma a scalini attraverso operazioni elementari sulle righe (scambio di righe, moltiplicazione di una riga per uno scalare non nullo, somma di una riga con un multiplo di un'altra riga). Il rango della matrice sarà uguale al numero di righe non nulle nella matrice ridotta a scalini.
Come Funziona l'Algoritmo di Gauss: Un Esempio
Chiariamo con un esempio qual è il risultato dell'algoritmo di Gauss. Consideriamo la matrice:
[A=\begin{bmatrix}1&2&0&1\2&4&2&4\0&0&6&6\-1&-2&1&0\end{bmatrix}]
L'idea è di sottrarre e sommare tra loro le righe di $A$ (moltiplicate eventualmente per determinati coefficienti), in modo da far comparire nella matrice il numero più alto possibile di righe composte unicamente da zeri.
Partiamo dalla matrice $A$ e sottraiamo alla seconda riga il doppio della prima riga:$R2 \to R2 - 2R_1$Si ottiene la matrice:[ \begin{bmatrix}1&2&0&1\0&0&2&2\0&0&6&6\-1&-2&1&0\end{bmatrix}]
Successivamente, addizioniamo la quarta riga con la prima riga:$R4 \to R4 + R_1$Si ottiene:[ \begin{bmatrix}1&2&0&1\0&0&2&2\0&0&6&6\0&0&1&1\end{bmatrix}]
Infine, sottraiamo alla terza riga il triplo della seconda riga e sottraiamo alla quarta riga metà della seconda riga.$R3 \to R3 - 3R2$$R4 \to R4 - \frac{1}{2}R2$Si ottiene la matrice a scalini:[A'=\begin{bmatrix}1&2&0&1\0&0&2&2\0&0&0&0\0&0&0&0\end{bmatrix}]
Tale matrice $A'$ ha due righe composte interamente da zeri, e non è possibile fare in modo che ce ne siano altre (intuitivamente, non è possibile "mandar via" il $2$ presente al terzo posto della seconda riga, dato che nella prima riga c'è uno $0$ al terzo posto). Il numero di righe non nulle in $A'$ è 2. Pertanto, il rango della matrice $A$ è 2. L'algoritmo di Gauss è un metodo potente e sistematico che, pur non essendo direttamente il metodo dell'orlatura, fornisce un modo efficiente per determinare il rango di una matrice di qualsiasi dimensione, inclusa la $4 \times 4$. La scelta del metodo dipende spesso dalla preferenza personale e dalla specifica struttura della matrice in esame.