La forza d'attrito è un concetto fondamentale in fisica, onnipresente nel mondo reale e cruciale per comprendere il movimento, o la sua assenza, di un corpo. Essa è definita come una forza di contatto passiva, ovvero generata dal semplice contatto tra due superfici e tale da opporsi al movimento di un corpo. Questo "amico-nemico", spesso sottovalutato, è indispensabile per la maggior parte delle nostre attività quotidiane che coinvolgono il movimento terrestre, dal semplice camminare all'utilizzo di veicoli come biciclette, autobus o supercar. Senza l'attrito, la nostra auto resterebbe inchiodata, con motore e ruote che girano a vuoto, anche su una superficie liscia come il ghiaccio.

Le Diverse Tipologie di Attrito
L'attrito si manifesta in diverse forme, ciascuna con le proprie caratteristiche e applicazioni. La comprensione di queste distinzioni è essenziale per analizzare la dinamica del movimento.
Attrito Radente: Il Contatto Scabro
L'attrito radente agisce parallelamente alle superfici che, scivolando l'una sull'altra, lo generano. Le superfici che danno origine a questo tipo di attrito sono chiamate scabre. Si distingue tra attrito radente statico e attrito radente dinamico.
Attrito Radente Statico: La Forza che Impedisce il Moto Iniziale
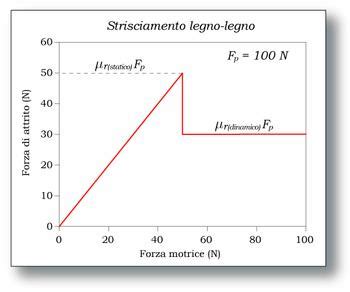
L'attrito statico è la forza che impedisce che corpi posti su una superficie scabra e inizialmente in quiete, inizino a muoversi se la forza agente su di essi, in direzione parallela alla superficie, non supera una certa soglia. Fino a quando la forza applicata non supera questa soglia, il corpo rimane fermo. Una volta superata la soglia, l'attrito statico smette di opporsi, cessando del tutto.
Per calcolare la forza di attrito radente statico si utilizza la formula $FA = F\perp \times \mus$, dove $FA$ è la forza di attrito radente, $F\perp$ è la componente perpendicolare al piano di appoggio della forza esercitata dal piano di appoggio sul corpo (spesso coincidente con il peso dell'oggetto, $P = M \times g$), e $\mus$ è il coefficiente di attrito radente statico. Questo coefficiente è caratteristico di ciascuna superficie e varia in base alla sua levigatezza e irregolarità. È una grandezza adimensionale e dipende dai materiali delle due superfici a contatto e dal modo in cui sono state lavorate. Il valore del coefficiente $\mu_s$ è generalmente superiore a quello del coefficiente di attrito dinamico.
Esempio Pratico: Immaginate di dover spostare un armadio pesante. Spingete, ma l'armadio non si muove. Ciò significa che siete in presenza di un equilibrio tra le forze che agiscono sull'armadio: la forza di attrito statico è pari alla forza da voi esercitata, oppure la vostra forza è troppo debole per superare la soglia dell'attrito statico massimo.
Attrito Radente Dinamico: La Forza Durante il Movimento
Una volta che il corpo inizia a muoversi, subentra l'attrito radente dinamico. Questa forza perdura finché il corpo è in movimento e si oppone al suo spostamento. La sua formula è $FA = F\perp \times \mud$, dove $\mud$ è il coefficiente di attrito radente dinamico. È importante notare che il coefficiente di attrito dinamico ($\mud$) è minore rispetto al coefficiente di attrito statico ($\mus$) per le medesime superfici. Questo implica che la forza necessaria per avviare il movimento è superiore a quella necessaria per mantenerlo.
Esempio Pratico: Se si sta spingendo un blocco di acciaio su una superficie dello stesso materiale, e la forza applicata è di 200 N, mentre la forza di attrito statico massima calcolata è di 362,97 N, il blocco resterà fermo. Solo una volta superati i 362,97 N il blocco si muoverà, e a quel punto la forza per mantenerlo in movimento dovrà vincere l'attrito dinamico.
Attrito Volvente: Il Rotolamento e le Forze Dissipative
Quando un corpo rotola anziché strisciare su una superficie, si parla di attrito volvente. Questa forza impedisce al corpo di scivolare e lo induce a rotolare. L'attrito volvente rientra tra le forze dissipative, poiché contribuisce a disperdere l'energia cinetica del corpo, esercitando un'azione frenante.
La resistenza prodotta dall'attrito volvente è in generale molto minore rispetto a quella dovuta all'attrito radente. Il rotolamento puro è reso possibile dalla presenza di attrito radente statico tra la ruota e il terreno. Se questo attrito fosse assente o molto piccolo (come su una superficie ghiacciata), la ruota striscerebbe senza compiere un rotolamento puro, e subentrerebbe l'attrito radente dinamico che si oppone allo slittamento. Questo, riducendo progressivamente la velocità relativa tra i corpi striscianti, tende a ripristinare le condizioni di puro rotolamento.
La formula per la forza di attrito volvente è $Fv = \muv \cdot F\perp / r$, dove $Fv$ è la forza di attrito volvente, $\mu_v$ è il coefficiente di attrito volvente (molto più basso sia di quello statico che di quello dinamico) e $r$ è il raggio del corpo che rotola. Poiché la forza di attrito volvente è inversamente proporzionale al raggio del corpo, maggiore sarà il raggio e minore risulterà la forza che si oppone al suo movimento. Questo spiega perché un carro con ruote enormi avanza meglio di uno con ruote piccole.
L'effetto dell'attrito volvente si può descrivere spostando leggermente all'indietro, nel senso opposto al moto, la reazione vincolare (in genere non perfettamente normale) esercitata dal piano di rotolamento sul corpo rotolante. In questo modo, tale reazione vincolare avrà non solo una componente contraria al moto traslatorio, ma anche un momento di forza rispetto all'asse di rotazione della ruota che si oppone al moto rotatorio.
Attrito Viscoso: La Resistenza del Fluido
L'attrito viscoso si riferisce alla resistenza al movimento di un fluido (liquido o gas) quando le molecole del fluido scivolano l'una sull'altra. Quando uno strato di fluido scorre su un altro strato adiacente, le molecole del fluido interagiscono tra loro, rallentando il movimento. La forza di attrito viscoso è proporzionale alla velocità del fluido e all'area attraverso cui scorre.
Un esempio chiave di attrito viscoso nel contesto automobilistico è la resistenza aerodinamica. La forza del freno aerodinamico ($Ra$) è causata dall'attrito viscoso generato dalle molecole dell'aria che investono una superficie solida. L'intensità di questa forza dipende dalla forma del veicolo (il famoso coefficiente aerodinamico $Cx$) e cresce con il quadrato della velocità. La sua forma è $Ra = B \times v^2$, dove $B$ è una costante che integra il $Cx$ e i fattori dimensionali.

Attrito Anisotropo: Variazioni con la Direzione
Gli effetti di anisotropia sull'attrito dinamico includono la variazione dell'intensità dell'attrito con la direzione di scivolamento e la comparsa di componenti della forza di attrito trasversali alla direzione di scivolamento. La trattazione matematica dell'anisotropia dell'attrito richiede di trasformare il coefficiente di attrito da quantità scalare a quantità tensoriale in uno spazio bidimensionale.
Nel caso di attrito isotropo, ogni direzione del piano di scivolamento è direzione principale di attrito e il tensore di attrito si rappresenta algebricamente con una matrice 2x2 diagonale con due coefficienti identici (coincidenti con il coefficiente di attrito radente). Nel caso di attrito anisotropo, il tensore di attrito rimane rappresentabile con una matrice 2x2 se il numero di direzioni principali è inferiore o uguale a due. Le superfici che danno origine a effetti di anisotropia dell'attrito sono superfici strutturate a diverse scale dal punto di vista morfologico.
L'Attrito e il Movimento dell'Auto
Perché un'auto si muove e perché non si muove, per esempio, sul ghiaccio? La risposta risiede nell'attrito. Il motore genera una coppia (una forza rotazionale) che, attraverso la trasmissione, raggiunge le ruote motrici. Se l'auto fosse sollevata sul ponte dal meccanico o su una pista di ghiaccio, le ruote inizierebbero a girare all'impazzata a vuoto, non incontrando alcuna resistenza. Se invece l'auto è ben appoggiata su una superficie ruvida, come l'asfalto delle strade, appena una ruota cerca di girare, incontra una resistenza molto consistente: la forza di attrito radente.
La ruota, sottoposta alla coppia motrice del motore, vorrebbe girare liberamente (come sul ghiaccio) ma è "bloccata" dalla forza di attrito $F_a$, che agisce nel punto di contatto con la strada, e che la costringe a entrare nel cosiddetto regime di puro rotolamento. Questo significa che il punto di contatto in ogni istante resta fermo e il resto della ruota "trasla" mentre gira per effetto della coppia motrice.
L'unica condizione che permette all'auto di accelerare senza slittare è che la forza $Fm$ che arriva dal motore sia minore o uguale alla forza di attrito $Fa$. Solo se questa disuguaglianza è rispettata si instaura il moto molto vicino al rotolamento puro, quello che comunemente avviene quando l'auto viaggia in condizioni normali. Se, invece, si dà troppo gas, con un'auto molto potente, o si è in condizioni di aderenza ridotta (come quando piove o nevica), può accadere che $Fm$ superi $Fa$ in quanto diminuisce il valore del coefficiente di attrito $\mu$.
È giusto dire che maggiore è il valore di attrito $\mu$ e maggiore sarà l'accelerazione massima ottenibile? E che maggiore sarà il peso e tanto maggiore sarà l'accelerazione massima sopportabile prima che inizi lo slittamento? Sbagliato, perché se è vero che aumenta il valore di $F_a$, è altrettanto vero che aumentando la massa che deve essere spostata, l'accelerazione dinamica ne risente secondo la legge della dinamica $a = F/m$. In pratica, la stessa massa che aiuta a non far slittare il veicolo è la stessa che ne rallenta l'accelerazione. In condizioni normali (asfalto asciutto), le auto di F1 sono leggere, eppure schizzano come fulmini perché hanno pneumatici ad altissimo coefficiente di attrito (superiore a 1 con gli slick) e una coppia motrice esagerata al punto da dover essere dosata per evitare il pattinamento in partenza o a bassa velocità. Questo è il motivo per cui il limite fisico al valore dell'accelerazione di un'auto, leggera o pesante che sia, è imposto unicamente dal coefficiente di attrito, che a sua volta dipende dalle caratteristiche dei due materiali a contatto.
Attriti "Cattivi": Quando l'Attrito si Oppone al Progresso
Abbiamo visto il lato "buono" dell'attrito, quello che permette il movimento. Ma esiste anche un lato "cattivo", rappresentato dalle forze di attrito che si oppongono all'avanzamento del veicolo e consumano energia. Queste forze sono sostanzialmente di due tipi:
- Forza di resistenza per attriti meccanici ($Rm$): È causata dalla somma degli attriti dei vari organi del motore, della trasmissione e anche dall'attrito volvente delle ruote. Si può considerare $Rm = A$, dove $A$ è una costante.
- Forza freno aerodinamico ($Ra$): Come già accennato, è causata dall'attrito viscoso dell'aria e cresce con il quadrato della velocità ($Ra = B \times v^2$).
Se facciamo la somma vettoriale di tutte queste forze, otteniamo la forza risultante $F$ che agisce sul veicolo: $F = Fa - Rm - R_a$. L'accelerazione dell'auto è $a = F / (M \times g)$ (dove M è la massa e g l'accelerazione di gravità).
La Velocità Massima: Equilibrio di Forze
Finché il valore di $F$ è positivo (maggiore di zero), l'auto continuerà ad accelerare. Ma crescendo la velocità, crescerà anche la forza di attrito aerodinamica, in quanto questa è una forza che cresce con il quadrato della velocità. Raggiunta una certa velocità, la somma delle forze resistenti ($Rm + Ra$) sarà uguale alla forza motrice $F_a$. A quel punto, la forza risultante $F$ si azzera e l'auto non accelera più. L'attrito aerodinamico non cresce più perché non cresce più la velocità, quindi il risultato è una condizione di equilibrio in cui la velocità si stabilizza a un limite, la velocità massima.
L'energia che arriva dal carburante (o dalla batteria) quando la macchina non accelera più e procede a velocità costante in piano, dove finisce? La risposta è che, raggiunta la velocità limite, questa energia è esattamente la potenza prodotta dalle forze d'attrito e finisce convertita in calore che, secondo dopo secondo, viene dissipato nell'ambiente. La potenza sviluppata dalla resistenza dell'aria è $Pa = Ra \times v$.
Guida completa alla resistenza aerodinamica - metodi per ridurre la resistenza su un velivolo
Se eliminassimo le due forze di attrito (attriti meccanici e aerodinamici), avremmo una potenza che, teoricamente, andrebbe tutta ad accelerare la vettura senza alcuno spreco energetico (come nei razzi nello spazio, dove non c'è atmosfera che frena). Immaginando una Panda che viaggia su un'autostrada lunare, potrebbe sfrecciare a velocità impensabili, sarebbe sufficiente dotarla di un cambio con marce lunghissime. Ovviamente, è presumibile che scoppino gli pneumatici abbastanza presto, o salti qualche altro pezzo meccanico.
Le Auto Elettriche e la Rigenerazione
Quanto descritto finora vale sia per le motorizzazioni elettriche che per quelle endotermiche. Le auto elettriche, però, hanno un asso nella manica nella guerra contro gli attriti "spreconi": la rigenerazione. Durante la decelerazione, i motori elettrici possono funzionare come generatori, convertendo parte dell'energia cinetica del veicolo in energia elettrica che viene immagazzinata nella batteria, anziché dissiparla interamente in calore tramite i freni tradizionali o la resistenza dell'aria. Questo migliora l'efficienza complessiva e l'autonomia del veicolo.
L'Attrito Nello Sterzo e la Dinamica del Veicolo
L'attrito riveste un ruolo cruciale anche nella dinamica dello sterzo di un veicolo, influenzando la tenuta di strada e la maneggevolezza. L'area di contatto dello pneumatico con la strada è il punto focale di queste interazioni.
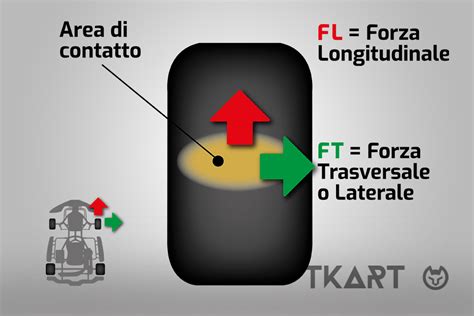
Forze Trasversali e Longitudinali: Il Cerchio di Kamm
Le forze scambiate tra pneumatico e strada possono essere longitudinali (trazione o frenata) o trasversali (forza laterale che permette di curvare). Uno scambio di forze puramente laterale o puramente longitudinale è un concetto piuttosto teorico. Il concetto di attrito combinato ci permette di apprendere molti fenomeni che regolano la dinamica dell'auto. Per esempio, se stiamo impegnando l'auto in una curva, sfruttando tutta la forza laterale disponibile (e quindi ci troviamo sull'asse delle ascisse, al limite destro o sinistro del Cerchio di Kamm), non possiamo chiedere agli pneumatici anche di accelerare o di frenare, perché abbiamo ormai saturato l'attrito disponibile. È invece possibile sfruttare la massima frenata (o la massima accelerazione) quando siamo a ruote diritte, cioè quando ci troviamo sull'asse delle ordinate.
L'origine del sistema di assi di riferimento per lo pneumatico è il centro dell'area di contatto, ovvero l'intersezione dell'asse 'z' con il piano della strada (supposta piana). L'asse 'x' è posto all'intersezione del piano della ruota con quello della strada.
Scorrimento e Angolo di Deriva
In condizioni di puro rotolamento, lo scorrimento (rapporto tra la differenza tra la velocità periferica della ruota e la velocità di traslazione del veicolo, e la velocità periferica della ruota stessa) è uguale a zero. Se lo scorrimento è nullo, lo pneumatico non è in grado di scambiare forze longitudinali, quindi non può trasmettere coppia traente o frenante. Tuttavia, nella realtà, un piccolo scorrimento è sempre presente e necessario per generare le forze.
Analogamente allo scorrimento longitudinale, esiste l'angolo di deriva. Questo è l'angolo tra la direzione di avanzamento della ruota e la direzione in cui è orientata la ruota stessa. Anche in questo caso, si nota un primo tratto di comportamento lineare per piccoli angoli di deriva, a cui segue una zona di saturazione attorno al valore massimo e infine un tratto discendente. Significa che, oltre un certo angolo di deriva (in genere tra i 5 e gli 8 gradi per uno pneumatico stradale), lo pneumatico non è più in grado di incrementare la forza laterale scambiata, ma anzi questa diminuisce.
Sottosterzo e Sovrasterzo: L'Influenza dell'Attrito
Questo concetto spiega, ad esempio, il fenomeno del sottosterzo. Il sottosterzo si verifica quando, in curva, l'asse anteriore dell'auto perde aderenza prima di quello posteriore, facendo sì che il veicolo tenda ad allargare la traiettoria. In alcuni casi, ciò avviene quando si esagera con l'angolo del volante in curva, superando il valore massimo di forza laterale che lo pneumatico anteriore può generare. Per correggerlo, basterà sterzare di meno (anziché, istintivamente, di più) per far crescere la forza centripeta dell'asse anteriore, permettendo al pneumatico di rientrare nel tratto crescente della curva forza laterale-angolo di deriva.
Il trasferimento di carico trasversale su un asse, un fenomeno che carica maggiormente la ruota esterna alla curva, è dannoso e provoca una perdita di aderenza complessiva di quell'asse. Infatti, l'aumento di aderenza della ruota esterna è minore della perdita di aderenza di quella interna (proprio per l'andamento non lineare appena descritto della dipendenza delle forze tangenziali rispetto al carico normale). L'aumento della massa della vettura, aumentando il carico verticale agente sugli pneumatici, va a peggiorare le caratteristiche di aderenza dello pneumatico, quindi la tenuta di strada.
Effetti Dinamici nel Force Feedback dello Sterzo
Nei simulatori di guida e nei volanti con force feedback, l'attrito e la dinamica dello sterzo sono simulati attraverso diversi effetti.
- Forza Costante (Constant): Una forza costante conserverà il proprio livello nel tempo. Viene spesso utilizzata per simulare la forza di gravità (G-Force), con il valore della forza che aumenta a seconda della velocità e dell'angolo di sterzata.
- Forza Periodica (Periodic): Una forza periodica varierà nel tempo in base al tipo di effetto periodico, all'ampiezza e alla frequenza. Può generare un effetto di scuotimento sul volante, simulando ad esempio una strada sconnessa. Frequenze molto basse possono essere utilizzate per ricreare gli effetti degli incidenti.
- Forza a Molla (Spring): Una forza a molla aumenta in base a quanto ci si trova lontani da una particolare posizione del volante. La tipica forza a molla è il ritorno del volante nella propria posizione centrale, ma può essere anche regolata su un valore negativo, comportando un allontanamento del volante dalla propria posizione centrale.
- Forza Ammortizzatrice (Damper): Una forza ammortizzatrice regola il modo in cui il volante reagisce quando viene mosso. Viene normalmente utilizzata come attrito (dinamico) o mentre il volante sta tornando nella propria posizione centrale (effetto a molla), comportandosi come controllo di attenuazione in un sistema massa-molla. Generalmente, un gioco sfrutta la forza ammortizzatrice per rendere più complicato per il giocatore ruotare il volante in certe circostanze, oppure, in altre situazioni, rendere tutto questo estremamente semplice e fluido. Un esempio è controllare la forza da esercitare sul volante per farlo girare.
Gli effetti Spring e Damper sono detti Effetti Dinamici, in quanto si basano su informazioni che dipendono dal volante (la posizione per la molla, o la velocità per l'ammortizzatore). Gli Effetti Dinamici rappresentano quel tipo di effetti che beneficiano, più di altri, dell'implementazione di un force-feedback hardware (e non software), in quanto si rende necessaria una risposta rapida basata sul modo in cui il giocatore ruota il proprio volante. Gli effetti Constant e Periodic, invece, sono definiti Effetti Statici.